
自走式リターン装置搭載により、先導体を発進立坑に引きもどして回収。
カッター交換後再挿入。
土質の変化に応じた掘削途中のビット交換、既設管への直接接続など、従来工法では不可能な工事にも、広範囲に対応できます。
あらゆる土質、施工条件がクリアーでき、自動運転可能な掘削ロボット開発が夢でした。パイプリターン工法で、その夢に向かって一歩前進いたしました。このマシンの特徴は全土質・長距離・全方向の掘削に加え、地中での障害物などにも対応が可能で、自動制御システムにより運転操作も簡単な掘削ロボットという点です。これにより、推進工事はもちろんのこと基礎工事、法面工事、パイプルーフ工事など広範囲な施工が可能となりました。
パイプリターン工法の特徴
推進管はそのままで、掘削機が縮小・自走後退し、再挿入が可能
土質に対応したビット交換・排土方式が選択できます。
地盤改良が先導体内部より行えます。
トラブル時、管を抜かなくても良いので、環境に与える影響が少なくて済むようになりました。
小スペースの発進基地。到達立坑は不問
最小寸法Φ2000mmの発進立坑(PR450)。(水平方向推進時)
到達立坑は不要。既設管、既設人孔等への接続が可能。
バリエーション豊かな排土及び掘削方式の選択
泥水環流システム、泥土圧式、エアリフト方式、真空排土、圧送排土方式などオールマイティ。
施工中であっても選択が可能。
全方向掘削が可能
下向き、水平方向、真上、斜め、360°OK!
長距離掘削最大300mが可能
電子機器の高機能化により、高精度な測量管理システムを実現。
リアルタイムに方向修正、精度管理が可能。
施工条件・土質・地中の障害物などに幅広く対応!
先導体内部より薬液注入可能
既設人孔への接続工事
地中ドッキング
先導体回収不能な現場・工事車両の進入が困難な現場
河川地下推進工事
従来方法で切れなかった障害物をピット交換により克服
迎え掘りが可能
従来推進工法の先導体との地中ドッキング
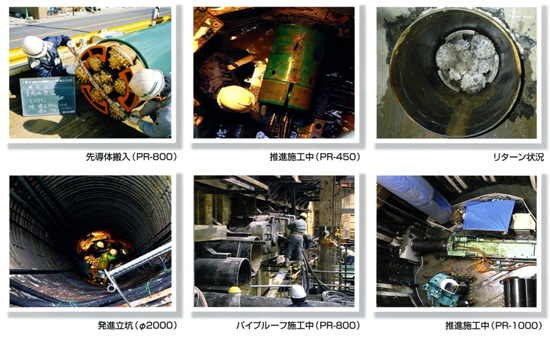
現場施工写真
コアカッター試験
